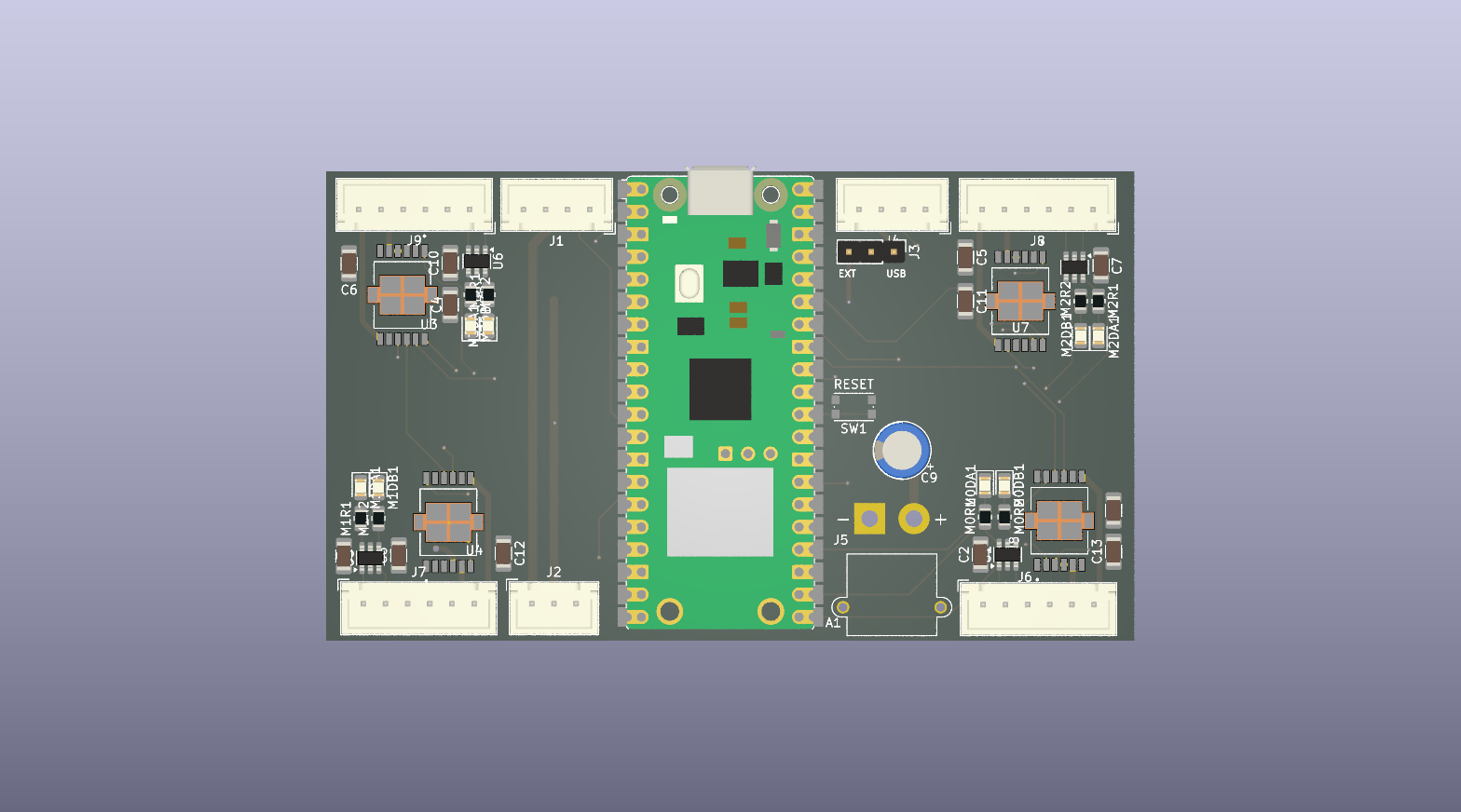
This is the PCB that controls the wheels and linear actuator on NE-Five, it's a work in progress and used entirely at your own risk.
It uses a Pi Pico at its core with four IFX9201SG motor controllers, it has one servo header that includes an analogue feedback pin to control a linear actuator.
Many thanks to Mark Mellors, Phillip Skippy McGaw, and Robert Karpinski for incredibly useful feedback!
Using this github action