
- Upload the code in
RoverControllerto the Arduino board - Create a ROS workspace and add the contents of this repo to the
srcfolder
thumper_ws/
.... build/
.... devel/
.... src/
....... wild-thumper/
Then launch
catkin_make
source devel/setup.bash
roslaunch pololu pololu_teleop.launch
Use w, a, s, d to control the robot.
The Arduino interface was adapted from: https://github.com/watai/Robotic-Photographer
Connect the RC receiver to the TReX RMC
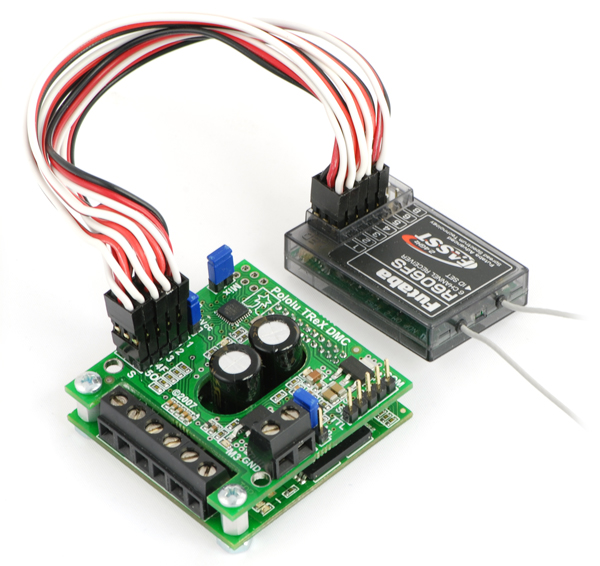
Make sure you connected the BEC Jumper to give power to the RC receiver and the Channel-Mix Jumper to control both motors at the same time.

To calibrate the RC controller, read section 3.e of the manual
https://www.pololu.com/docs/pdf/0J1/TReX.pdf
The board has 2 status LEDs (red and green) and one power LED (blue). Use them to debug according to the descriptions provided in the manual.
- Use channel 5 to switch between serial (arduino) and RC Mode.